Timeline of Robotics 2 of 2
you are here: main page > reference > robotics2
Note from the editor:
This is part 2 of the timeline on robotics.
The status of this page is to give you a first impression of the history of robotics in modern times and will be extended regularly.
If you feel developments or events have been skipped or wrongly interpreted or need additional information or you want to become co-editor of this Robotics section, or contribute in another way, please contact the editor
![]() Warren
McCulloch and Walter Pitts do pioneering work on neural networks that
can learn about the world in much the same way that we do.
Warren
McCulloch and Walter Pitts do pioneering work on neural networks that
can learn about the world in much the same way that we do.
![]() George
Devol patents a playback device for controlling machines, using magnetic
recording.
George
Devol patents a playback device for controlling machines, using magnetic
recording.
![]() Concept
of a stored program (von Neumann) and generic re-programmability of computers.
Concept
of a stored program (von Neumann) and generic re-programmability of computers.
The first general-purpose digital computer, dubbed Whirlwind, solves its first problem at M.I.T.(23)
![]() Norbert
Wiener, a professor at M.I.T., publishes Cybernetics or "Control
and Communication in the Animal', a book which describes the concept of
communications and control in electronic, mechanical, and biological systems.
Norbert
Wiener, a professor at M.I.T., publishes Cybernetics or "Control
and Communication in the Animal', a book which describes the concept of
communications and control in electronic, mechanical, and biological systems.
![]() British
robotics pioneer William Grey Walter creates autonomous machines called
Elmer and Elsie that mimic lifelike behavior with very simple circuitry.
British
robotics pioneer William Grey Walter creates autonomous machines called
Elmer and Elsie that mimic lifelike behavior with very simple circuitry.
![]() Alan
Turing publishes Computing Machinery and Intelligence in which he proposes
a test to determine whether or not a machine has gained the power to think
for itself.
Alan
Turing publishes Computing Machinery and Intelligence in which he proposes
a test to determine whether or not a machine has gained the power to think
for itself.
It becomes known as the "Turing Test". Since then each year a contest is held between various software developers to determine how close they have come to the true Turing Machine.
![]() The
Day the Earth Stood Still premieres in theaters. The movie features an
alien named Klaatu and his robot Gort.
The
Day the Earth Stood Still premieres in theaters. The movie features an
alien named Klaatu and his robot Gort.
![]() In
France, Raymond Goertz designs the first tel operated articulated arm
for the Atomic Energy Commission.
In
France, Raymond Goertz designs the first tel operated articulated arm
for the Atomic Energy Commission.
The design is based entirely on mechanical coupling between the master and slave arms (using steel cables and pulleys). Derivatives of this design are still seen in places where handling of small nuclear samples is required. This is generally regarded as the major milestone in force feedback technology.
![]() The
first NC (numerically controlled) machine is built.
The
first NC (numerically controlled) machine is built.
![]() George
Devol and Joe Engleberger design the first programmable robot "arm"
and uses the term Universal Automation for the first time. Thus planting
the seed for the name of his future company - Unimation.
George
Devol and Joe Engleberger design the first programmable robot "arm"
and uses the term Universal Automation for the first time. Thus planting
the seed for the name of his future company - Unimation.
![]() Alan
Newell and Herbert Simon create the Logic Theorist, the first "expert
system". It is used to help solve difficult math problems.
Alan
Newell and Herbert Simon create the Logic Theorist, the first "expert
system". It is used to help solve difficult math problems.
![]() Marvin
Minsky and John McCarthy organize a conference in Dartmouth, Massachusetts,
US, which brings together the leading figures in the field of robotics
and machine research. The conference coins the phrase "artificial
intelligence".(16)
Marvin
Minsky and John McCarthy organize a conference in Dartmouth, Massachusetts,
US, which brings together the leading figures in the field of robotics
and machine research. The conference coins the phrase "artificial
intelligence".(16)
![]() Squee, the electronic robot squirrel. The two phototubes
or "eyes" are at the top of the steering post; the scoop which opens
and closes, or "hands", is at the front.
Squee, the electronic robot squirrel. The two phototubes
or "eyes" are at the top of the steering post; the scoop which opens
and closes, or "hands", is at the front.
Squee (named after "squirrel") is an electronic robot squirrel. It contains four sense organs (two phototubes, two contact switches), three acting organs (a drive motor, a steering motor, and a motor which opens and closes the scoop or "hands"), and a small brain of half a dozen relays. It will hunt for a "nut". The "nut" is a tennis ball designated by a member of the audience who steadily holds a flashlight above the ball, pointing the light at Squee. Then Squee approaches, picks up the "nut" in its "hands" (the scoop), stops paying attention to the steady light, sees in stead a light that goes on and off 120 times a second shining over its "nest", takes the "nut" to its "nest", there leaves the nuts, and then returns to hunting more "nuts". Data: completed; rather well finished but not professionally; 75% reliable; maintenance, difficult; our costs, about $3,000. (9)
![]() George
Devol and Joseph Engelberger formed the world's first robot company.
George
Devol and Joseph Engelberger formed the world's first robot company.
George Devol and Joseph F. Engelberger meet at a cocktail party and during the evening exchange some serious ideas:* 50 percent of the people who work in factories are really putting and taking.
* Why are machines made to produce only specific items?
* How about approaching manufacturing the other way around, by designing machines that could put and take anything?As a result of this discussion the same year Devol and Engelberger form the world's first robot company. It is called Unimation, Inc.
Thanks to a huge effort on Devol's part along with the management skill of Joseph Engelberger Devol's robot evolves into the Unimate. It combines industrial manipulator technology and nascent computer control technology. Their first robot is a material handling robot and is soon followed by robots for welding and other applications.(10) (**)
![]() The
term "artificial intelligence" is coined.
The
term "artificial intelligence" is coined.
Aided by a grant from the Rockefeller Foundation John McCarthy, Marvin Minsky, Nat Rochester and Claude Shannon organize The Dartmouth Summer Research Project on Artificial Intelligence at Dartmouth College.
 |
Servomechanisms Laboratory at MIT demonstrates one of the first practical application to computer-assisted manufacturing.
|
![]() John
McCarthy and Marvin Minsky start the Artificial Intelligence Laboratory
at the Massachusetts Institute of Technology (MIT).
John
McCarthy and Marvin Minsky start the Artificial Intelligence Laboratory
at the Massachusetts Institute of Technology (MIT).
![]() Computer-assisted
manufacturing was demonstrated at the Servomechanisms Lab at MIT.
Computer-assisted
manufacturing was demonstrated at the Servomechanisms Lab at MIT.
![]() Unimation
is purchased by Condec Corporation and development of Unimate Robot
Systems begins.(10)
Unimation
is purchased by Condec Corporation and development of Unimate Robot
Systems begins.(10)
![]() American
Machine and Foundry, later known as AMF Corporation, markets the first
cylindrical robot, called the Versatran, designed by Harry Johnson and
Veljko Milenkovic.
American
Machine and Foundry, later known as AMF Corporation, markets the first
cylindrical robot, called the Versatran, designed by Harry Johnson and
Veljko Milenkovic.
![]() Heinrich
Ernst develops the MH-1, a computer operated mechanical hand at MIT.
Heinrich
Ernst develops the MH-1, a computer operated mechanical hand at MIT.
![]() The
first Unimate robot is shipped from Danbury, Connecticut and installed
in a plant of General Motors in Trenton, New Jersey. (10)
The
first Unimate robot is shipped from Danbury, Connecticut and installed
in a plant of General Motors in Trenton, New Jersey. (10)
The assembly line robot Unimate is controlled step-by-step by commands stored on a magnetic drum, the 4,000-pound arm sequenced and stacked hot pieces of die-cast metal. Unimate is the brainchild of Joe Engelberger and George Devol, and originally automated the manufacture of TV picture tubes.
![]()
![]() The
first industrial arm robot - the Unimate - is introduced.
The
first industrial arm robot - the Unimate - is introduced.
It is designed to complete repetitive or dangerous tasks on a General Motors production line. This manipulator is the first of many Unimates to be deployed.
![]() John
McCarthy leaves MIT to start the Artificial Intelligence Laboratory at
Stanford University.
John
McCarthy leaves MIT to start the Artificial Intelligence Laboratory at
Stanford University.
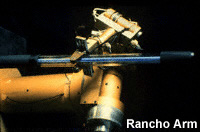
![]() The
first artificial robotic arm to be controlled by a computer is designed
at Rancho Los Amigos Hospital in Downey, California as a tool for the
handicapped.
The
first artificial robotic arm to be controlled by a computer is designed
at Rancho Los Amigos Hospital in Downey, California as a tool for the
handicapped.
The Rancho Arm six joints gave it the flexibility of a human arm. Acquired by Stanford University in 1963, it holds a place among the first artificial robotic arms controlled by a computer.
![]() Artificial
intelligence research laboratories are opened at M.I.T., Stanford Research
Institute (SRI), Stanford University, and the University of Edinburgh.
Artificial
intelligence research laboratories are opened at M.I.T., Stanford Research
Institute (SRI), Stanford University, and the University of Edinburgh.
![]() C&D
Robotics founded.
C&D
Robotics founded.
![]() Carnegie
Mellon University establishes the Robotics Institute.
Carnegie
Mellon University establishes the Robotics Institute.
![]() Homogeneous
transformations applied to robot kinematics - this remains the foundation
of robotics theory today
Homogeneous
transformations applied to robot kinematics - this remains the foundation
of robotics theory today
![]() DENDRAL
is the first expert system or program designed to execute the accumulated
knowledge of subject experts.
DENDRAL
is the first expert system or program designed to execute the accumulated
knowledge of subject experts.
![]() An
artificial intelligence program named ELIZA is created at MIT by Joseph
Weizenbaum.
An
artificial intelligence program named ELIZA is created at MIT by Joseph
Weizenbaum.
ELIZA functions as a computer psychologist that manipulates its users statements to form questions. Weizenbaum is disturbed at how quickly people put faith in his little program.
![]() The
Stanford Research Institute creates Shakey.
The
Stanford Research Institute creates Shakey.
The first mobile robot that can reason about its surroundings. Five years later, funding is cancelled when the shortcomings of the machine become apparent.(16)
![]() Richard
Greenblatt writes, MacHack, a program that plays chess.
Richard
Greenblatt writes, MacHack, a program that plays chess.
In response to a recent article written by Hurbert Dreyfus where he suggests, as a critique to efforts in artificial intelligence, that a computer program could never beat him in a game of chess. When the program is finished and Dreyfus is invited to play the computer he leads for most of the game but ultimately loses in the end in a close match. Greenblatt's program would be the foundation for many future chess programs, ultimately culminating in Big Blue the chess program that beats chess Grand Master Gary Kasparov.
![]() Japan
imports the Versatran robot from AMF (the first robot imported into Japan).
Japan
imports the Versatran robot from AMF (the first robot imported into Japan).
![]() Stanley
Kubrick makes Arthur C. Clark's, 2001: A Space Odyssey into a movie.
Stanley
Kubrick makes Arthur C. Clark's, 2001: A Space Odyssey into a movie.
It features HAL, an onboard computer that decides it doesn't need its human counterparts any longer. Hear HAL by clicking here.
![]() Kawasaki
licenses hydraulic robot design from Unimation and starts production in
Japan.
Kawasaki
licenses hydraulic robot design from Unimation and starts production in
Japan.
![]() The
octopus-like wall mounted tentacle Arm is developed by Marvin Minsky.
The
octopus-like wall mounted tentacle Arm is developed by Marvin Minsky.
Its twelve joints enabled the arm to go around corners. A PDP-6 computer controls the arm, powered by hydraulic fluids. The arm could lift the weight of a person.
![]() Victor
Scheinman, a Mechanical Engineering student working in the Stanford Artificial
Intelligence Lab (SAIL) creates the Stanford Arm.
Victor
Scheinman, a Mechanical Engineering student working in the Stanford Artificial
Intelligence Lab (SAIL) creates the Stanford Arm.
The arm's design becomes a standard and is still influencing the design of robot arms today.
Victor Scheinman´s Stanford Arm made a breakthrough as the first successful electrically powered, computer-controlled robot arm. By 1974, the Stanford Arm could assemble a Ford Model T water pump, guiding itself with optical and contact sensors. The Stanford Arm led directly to commercial production. Scheinman went on to design the PUMA series of industrial robots for Unimation, robots used for automobile assembly and other industrial tasks.

![]() Shakey
from SRI, Menlo Park
USA, can see and avoid obstacles. Shakey is introduced as the first mobile
robot controlled by artificial intelligence. It is produced by SRI International.
Shakey
from SRI, Menlo Park
USA, can see and avoid obstacles. Shakey is introduced as the first mobile
robot controlled by artificial intelligence. It is produced by SRI International.
SRI International´s Shakey is the first mobile robot controlled by artificial intelligence. And equipped with sensing devices driven by a problem-solving program called STRIPS, the robot finds its way around the halls of SRI by applying information about its environment to a route. Shakey uses a TV camera, laser range finder, and bump sensors to collect data, which it then transmits to a DEC PDP-10 and PDP-15. The computer radio's back commands to Shakey — who then moves at a speed of 2 meters per hour.(26)
![]() Professor
Victor Scheinman of Stanford University designs the Standard Arm. Today,
its kinematic configuration remains known as the Standard Arm.
Professor
Victor Scheinman of Stanford University designs the Standard Arm. Today,
its kinematic configuration remains known as the Standard Arm.
![]() Stanford
University produces the Stanford Cart. It is designed to be a line follower
but can also be controlled from a computer via radio link.
Stanford
University produces the Stanford Cart. It is designed to be a line follower
but can also be controlled from a computer via radio link.
![]() Cincinnati
Milacron Corporation releases the T3, (The Tomorrow Tool) the first commercially
available minicomputer-controlled industrial robot (designed by Richard
Hohn).
Cincinnati
Milacron Corporation releases the T3, (The Tomorrow Tool) the first commercially
available minicomputer-controlled industrial robot (designed by Richard
Hohn).
![]() The
AI department at Edinburgh, UK, shows off Freddy II, a robot that could
assemble objects automatically from a heap of parts.(16)
The
AI department at Edinburgh, UK, shows off Freddy II, a robot that could
assemble objects automatically from a heap of parts.(16)
![]() At
the Waseda university in Japan the Wabot-1 is built.
At
the Waseda university in Japan the Wabot-1 is built.
This is the first full-scale anthropomorphic robot built in the world. It consists of a limb control system, a vision system, and a conversation system. The Wabot-1 is able to communicate with a person in Japanese and to measure distances and directions to the objects using external receptors, artificial ears and eyes, and an artificial mouth. The Wabot-1 walkes with his lower limbs and is able to grip and transport objects with hands that used tactile sensors.(2)
![]() Victor
Scheinman forms his own company and starts marketing the Silver Arm. It
is capable of assembling small parts together using feedback from touch
and pressure sensors. (14)
Victor
Scheinman forms his own company and starts marketing the Silver Arm. It
is capable of assembling small parts together using feedback from touch
and pressure sensors. (14)
 (22)
(22)
![]() Victor
Scheinman develops the Programmable Universal Manipulation Arm (Puma),
which becomes widely used as industrial robots.(16)
Victor
Scheinman develops the Programmable Universal Manipulation Arm (Puma),
which becomes widely used as industrial robots.(16)
![]() Unimation
will purchase Vicarm Inc. (1977) and develop The PUMA (Programmable Universal
Machine for Assembly) robot to be marketed in 1979.(23)
Unimation
will purchase Vicarm Inc. (1977) and develop The PUMA (Programmable Universal
Machine for Assembly) robot to be marketed in 1979.(23)
 |
|---|
![]() Robot
arms are used on Viking 1 and 2 space probes. Vicarm Inc. incorporates
a microcomputer into the Vicarm design.
Robot
arms are used on Viking 1 and 2 space probes. Vicarm Inc. incorporates
a microcomputer into the Vicarm design.
![]() Star
Wars is released. George Lucas' movie about a universe governed by the
force introduces watchers to R2-D2 and C-3PO.
Star
Wars is released. George Lucas' movie about a universe governed by the
force introduces watchers to R2-D2 and C-3PO.
The movie creates the strongest image of a human future with robots since the 1960's and inspires a generation of researchers.(14)
![]() ASEA,
a European robot company, offers two sizes of electric powered industrial
robots. Both robots use a microcomputer controller for programming and
operation.
ASEA,
a European robot company, offers two sizes of electric powered industrial
robots. Both robots use a microcomputer controller for programming and
operation.
![]() Unimation
purchases Vicarm Inc.
Unimation
purchases Vicarm Inc.
![]()
![]() Using
technology from Vicarm, Unimation develops the PUMA (Programmable Universal
Machine for Assembly). The PUMA can still be found in many research labs
today.
Using
technology from Vicarm, Unimation develops the PUMA (Programmable Universal
Machine for Assembly). The PUMA can still be found in many research labs
today.
![]() Brooks
Automation founded
Brooks
Automation founded
![]() The
Robotics Institute at Carnegie Mellon University is established.
The
Robotics Institute at Carnegie Mellon University is established.
![]() Sankyo
and IBM market the SCARA (selective compliant articulated robot arm) developed
at Yamanashi University in Japan
Sankyo
and IBM market the SCARA (selective compliant articulated robot arm) developed
at Yamanashi University in Japan
![]() The
Stanford Cart is rebuilt by Hans Moravec in 1977.
The
Stanford Cart is rebuilt by Hans Moravec in 1977.
He adds a more robust vision system allowing greater autonomy in navigating across a room full of obstacles. These are some of the first experiments with 3D environment mapping. The Standford Cart crosses a chair-filled room without human assistance. The cart has a tv camera mounted on a rail which takes pictures from multiple angles and relays them to a computer. The computer analyzes the distance between the cart and the obstacles.

![]() Seymour
Papert publishes Mindstorms: Children, Computers, and Powerful Ideas where
he advocates constructivism, or learning through doing.
Seymour
Papert publishes Mindstorms: Children, Computers, and Powerful Ideas where
he advocates constructivism, or learning through doing.
![]() Takeo
Kanade builds the direct drive arm. It is the first to have motors installed
directly into the joints of the arm. This development makes joins faster
and much more accurate than previous robotic arms.
Takeo
Kanade builds the direct drive arm. It is the first to have motors installed
directly into the joints of the arm. This development makes joins faster
and much more accurate than previous robotic arms.
![]() Cognex
founded.
Cognex
founded.
![]() CRS
Robotics Corp. founded.
CRS
Robotics Corp. founded.
![]() "A
new life awaits you on the Off-World colonies." Blade Runner is released.
"A
new life awaits you on the Off-World colonies." Blade Runner is released.
This Ridley Scott film is based on the Philip K. Dick story "Do Androids Dream of Electric Sheep?" and starred Harrison Ford as Rick Deckard a retired Blade Runner that hunted Replicants (or illegal mutinous androids).(14)
![]() Fanuc
of Japan and General Motors form a joint venture: GM Fanuc. The new company
is going to market robots in North America.
Fanuc
of Japan and General Motors form a joint venture: GM Fanuc. The new company
is going to market robots in North America.
![]() Film
"Bladerunner" debuts as a story about androids that are "more
human than human."
Film
"Bladerunner" debuts as a story about androids that are "more
human than human."
![]() Adept
Technology founded.
Adept
Technology founded.
![]() Joseph
Engelberger starts Transition Robotics, later renamed Helpmates, to develop
service robots.
Joseph
Engelberger starts Transition Robotics, later renamed Helpmates, to develop
service robots.
 Doug
Lenat kicks off the EnCYClopedia project to create a database of common
sense to help robots understand our world.
Doug
Lenat kicks off the EnCYClopedia project to create a database of common
sense to help robots understand our world.
First started at Microelectronics and Computer Technology Corporation (MCC) where Professor Lenat worked as a principle scientist for 10 years. This project collects all over the world knowledge based on "microtheories" (R.V. Guha). Each microtheory is involved a human activity: shopping, swimming, etc. Many major corporations such as Bellcore, Apple, Kodak, DEC, AT&T, Microsoft, and Interval Research are the supporters of this project. (18)
![]() LEGO
and the MIT Media Lab collaborate to bring the first LEGO based educational
products to market.
LEGO
and the MIT Media Lab collaborate to bring the first LEGO based educational
products to market.
LEGO tc Logo is used by in the classrooms of thousands of elementary school teachers.
![]() Honda
begins a robot research program that's starts with the premise that the
robot "should coexist and cooperate with human beings, by doing what
a person cannot do and by cultivating a new dimension in mobility to ultimately
benefit society."
Honda
begins a robot research program that's starts with the premise that the
robot "should coexist and cooperate with human beings, by doing what
a person cannot do and by cultivating a new dimension in mobility to ultimately
benefit society."
![]() With
Unimation license terminated, Kawasaki develops and produces its own line
of electric robots.
With
Unimation license terminated, Kawasaki develops and produces its own line
of electric robots.
![]()
![]() Automated
selling of shares almost causes a (Wall street, USA) stock market meltdown.
Automated
selling of shares almost causes a (Wall street, USA) stock market meltdown.
![]() Stäubli
Group purchases Unimation from Westinghouse.
Stäubli
Group purchases Unimation from Westinghouse.
![]() A
walking robot named Genghis is unveiled by the Mobile Robots Group at
MIT. It becomes known for the way it walks, popularly referred to as the
"Genghis gait".
A
walking robot named Genghis is unveiled by the Mobile Robots Group at
MIT. It becomes known for the way it walks, popularly referred to as the
"Genghis gait".
![]() At
MIT Rodney Brooks and A. M. Flynn publish the paper "Fast, Cheap
and Out of Control: A Robot Invasion of the Solar System" in the
Journal of the British Interplanetary Society.
At
MIT Rodney Brooks and A. M. Flynn publish the paper "Fast, Cheap
and Out of Control: A Robot Invasion of the Solar System" in the
Journal of the British Interplanetary Society.
The paper changes rover research from building the one, big, expensive robot to building lots of little cheap ones. The paper also makes the idea of building a robot somewhat more accessible to the average person.
Academics start to concentrate on small, smart useful robots rather than simulated people.(17)
![]() Dr.
Seymour Papert becomes the LEGO Professor of Learning Research.
Dr.
Seymour Papert becomes the LEGO Professor of Learning Research.
![]() Computer
Motion founded.
Computer
Motion founded.
![]() Barrett Technology founded
Barrett Technology founded
![]() ABB
of Switzerland acquires Cincinnati Milacron (creator of PUMA).
Most small robot manufacturers go out of business leaving only a few that
now produce well developed industrial units.
ABB
of Switzerland acquires Cincinnati Milacron (creator of PUMA).
Most small robot manufacturers go out of business leaving only a few that
now produce well developed industrial units.
![]() In
an attempt to build a radio controlled vacuum cleaner Marc Thorpe has
the idea to start a robot combat event.
In
an attempt to build a radio controlled vacuum cleaner Marc Thorpe has
the idea to start a robot combat event.
![]() Dr.
John Adler came up with the concept of the CyberKnife a robot that images
the patient with x-rays to look for a tumor and delivering a pre-planned
dose of radiation to the tumor when found.
Dr.
John Adler came up with the concept of the CyberKnife a robot that images
the patient with x-rays to look for a tumor and delivering a pre-planned
dose of radiation to the tumor when found.
![]() Dante
an 8-legged walking robot developed at Carnegie Mellon University descends
into Mt. Erebrus, Antarctica.
Dante
an 8-legged walking robot developed at Carnegie Mellon University descends
into Mt. Erebrus, Antarctica.
Its mission is to collect data from a harsh environment similar to what we might find on another planet. The mission fails when, after a short 20 foot decent, Dante's tether snaps dropping it into the crater.

![]() Seiko
Epson develops a micro robot called Monsieur, the world's smallest micro
robot as certified by the Guinness Book of World Records.
Seiko
Epson develops a micro robot called Monsieur, the world's smallest micro
robot as certified by the Guinness Book of World Records.
![]() Sensable
Technologies founded.
Sensable
Technologies founded.
![]() Carnegie
Mellon University (CMU) Robotics Institute's Dante II, a more robust version
of its predecessor, descends into the crater of Alaskan (USA) volcano
Mt. Spurr to sample volcanic gases. The mission is considered a success.
Carnegie
Mellon University (CMU) Robotics Institute's Dante II, a more robust version
of its predecessor, descends into the crater of Alaskan (USA) volcano
Mt. Spurr to sample volcanic gases. The mission is considered a success.
![]() Marc
Thorpe starts Robot Wars at Fort Mason center in San Francsico, CA.
Marc
Thorpe starts Robot Wars at Fort Mason center in San Francsico, CA.
![]() The
second annual Robot Wars event is held at Fort Mason Center, San Francisco,
CA.
The
second annual Robot Wars event is held at Fort Mason Center, San Francisco,
CA.
![]() Intuitive
Surgical formed by Fred Moll, Rob Younge and John Freud to design and
market surgical robotic systems. Founding technology based on the work
at SRI, IBM and MIT.
Intuitive
Surgical formed by Fred Moll, Rob Younge and John Freud to design and
market surgical robotic systems. Founding technology based on the work
at SRI, IBM and MIT.
![]() A
RoboTuna (fish) is designed and built by David Barrett for his doctoral
thesis at MIT.
A
RoboTuna (fish) is designed and built by David Barrett for his doctoral
thesis at MIT.
It is used to study the way fish swim. Michael S. Triantafyllou a professor in the Department of Ocean Engineering is leading the research team. The fish is not a free swimming fish, that will take another few years or research to achieve. A project taken up by John Kumph (2004) (17)

![]() Chris
Campbell and Dr. Stuart Wilkinson ( University of South Florida in Tampa,
USA) turn a brewing accident into inspiration at the University of South
Florida.
Chris
Campbell and Dr. Stuart Wilkinson ( University of South Florida in Tampa,
USA) turn a brewing accident into inspiration at the University of South
Florida.
The result is the Gastrobot, a robot that digests organic mass to produce carbon dioxide that is then used for power. They call their creation the "flatulence engine." Later a more conventional nickname is given: "Chew Chew".
![]() Honda
unveils the P-2 (prototype 2), a humanoid robot that can walk, climb stairs
and carry loads.
Honda
unveils the P-2 (prototype 2), a humanoid robot that can walk, climb stairs
and carry loads.
![]() The
first node of the International Space Station is placed in orbit. Over
the next several years more components will join it, including a robotic
arm designed by Canadian company MD Robotics.
The
first node of the International Space Station is placed in orbit. Over
the next several years more components will join it, including a robotic
arm designed by Canadian company MD Robotics.
![]() Honda
showcases the P3, the 8th prototype in a humanoid design project started
in 1986.
Honda
showcases the P3, the 8th prototype in a humanoid design project started
in 1986.
![]() Computer
programs, called "web bots", become widely used on the web to
delve for information.
Computer
programs, called "web bots", become widely used on the web to
delve for information.
Web bots are build around a core that presumably has limited intelligence, or better 'smartness', clever algorithms to decide the relevance of information against what a user has requested to search for (information). Webbots are autonomous agents that seek their own way on or through the Internet without human intervention.
![]() The
first RoboCup football tournament is held in Nagoya, Japan. (16)
The
first RoboCup football tournament is held in Nagoya, Japan. (16)
![]()
![]() May,
World chess champion Garry Kasparov loses to IBM's Deep Blue supercomputer.
May,
World chess champion Garry Kasparov loses to IBM's Deep Blue supercomputer.
![]() July,
The Pathfinder Mission lands on Mars.
July,
The Pathfinder Mission lands on Mars.
Its robotic rover Sojourner, rolls down a ramp and onto Martian soil in early July. It continues to broadcast data from the Martian surface until September. NASA's Mars PathFinder mission captures the eyes and imagination of the world as PathFinder lands on Mars and the Sojourner rover robot sends back images of its travels on the distant planet. Over a few million visitors bombard the web server of NASA's per day necessitate NASA to set up mirror sites all over the world.
![]() Tiger
Electronics introduces the Furby for the Christmas toy market.
Tiger
Electronics introduces the Furby for the Christmas toy market.
It quickly becomes "the toy" to get for the season. Using a variety of sensors this "animatronic pet" can react to its environment and communicate using over 800 phrases in English and their own language "Furbish".
![]() LEGO
releases their first Robotics Invention SystemTM 1.0. LEGO names the product
line MINDSTORMS after Seymour Papert's seminal work of 1980.
LEGO
releases their first Robotics Invention SystemTM 1.0. LEGO names the product
line MINDSTORMS after Seymour Papert's seminal work of 1980.
![]() Scottish
hotel owner Campbell Aird is fitted with the world's first bionic arm.
Scottish
hotel owner Campbell Aird is fitted with the world's first bionic arm.
![]() August,
Cynthia Breazeal at MIT starts work on the Kismet robot, which can mimic
the emotional range of a baby.(16)
August,
Cynthia Breazeal at MIT starts work on the Kismet robot, which can mimic
the emotional range of a baby.(16)
![]() October,
Nasa launches the Deep Space 1 autonomous spacecraft which will test technologies
to be used in future missions crewed and conducted solely by robots. (16)
October,
Nasa launches the Deep Space 1 autonomous spacecraft which will test technologies
to be used in future missions crewed and conducted solely by robots. (16)

![]() May,
Sony builds Aibo, K9 the next generation. One of the first robots intended
for the consumer market. It reacts on sounds and has some sort of preprogrammed
behavior. It sells out within 20 minutes of going on sale.
May,
Sony builds Aibo, K9 the next generation. One of the first robots intended
for the consumer market. It reacts on sounds and has some sort of preprogrammed
behavior. It sells out within 20 minutes of going on sale.
![]() LEGO
releases The Robotics Discovery Set, Droid Developer Kit and the Robotics
Invention System 1.5.
LEGO
releases The Robotics Discovery Set, Droid Developer Kit and the Robotics
Invention System 1.5.
![]() Personal
Robots releases the Cye robot that can be used to perform a variety of
household chores.
Personal
Robots releases the Cye robot that can be used to perform a variety of
household chores.

![]() Honda
debuts a new humanoid robot ASIMO, the next generation of its series of
humanoid robots.
Honda
debuts a new humanoid robot ASIMO, the next generation of its series of
humanoid robots.
![]() The
Battlebots event is held in Las Vegas, Nevada.
The
Battlebots event is held in Las Vegas, Nevada.
![]() LEGO
releases the MINDSTORMS Robotics Invention SystemTM 2.0
LEGO
releases the MINDSTORMS Robotics Invention SystemTM 2.0
![]() October,
The UN estimates that there are 742,500 industrial robots in use worldwide.
More than half of these are being used in Japan.(16)
October,
The UN estimates that there are 742,500 industrial robots in use worldwide.
More than half of these are being used in Japan.(16)
![]() November
11, Sony unveils humanoid robots, dubbed Sony Dream Robots (SDR), at Robodex.
November
11, Sony unveils humanoid robots, dubbed Sony Dream Robots (SDR), at Robodex.
![]() November,
Computational neurobiologist Sandro Mussa-Ivaldi, from the Northwestern
University Medical School in Chicago, US, hooks up a lamprey brain to
sensors in order to control a robot. (16)
November,
Computational neurobiologist Sandro Mussa-Ivaldi, from the Northwestern
University Medical School in Chicago, US, hooks up a lamprey brain to
sensors in order to control a robot. (16)
![]() LEGO
releases the MINDSTORMS Ultimate Builder's Set
LEGO
releases the MINDSTORMS Ultimate Builder's Set

![]() Sony
releases the second generation of its Aibo robot dog.
Sony
releases the second generation of its Aibo robot dog.

![]() Built
by MD Robotics of Canada, the Space Station Remote Manipulator System
(SSRMS) is successfully launched into orbit and begins operations to complete
assembly of International Space Station.
Built
by MD Robotics of Canada, the Space Station Remote Manipulator System
(SSRMS) is successfully launched into orbit and begins operations to complete
assembly of International Space Station.
![]() April,
The Global Hawk robotic spy plane charts its own course over a distance
of 13,000 km (8,000 miles) between California, US, and Southern Australia.(16)
April,
The Global Hawk robotic spy plane charts its own course over a distance
of 13,000 km (8,000 miles) between California, US, and Southern Australia.(16)
![]() August,
the FDA clears the CyberKnife to treat tumors anywhere in the body.
August,
the FDA clears the CyberKnife to treat tumors anywhere in the body.


![]() Honda's
Asimo was the first robot that could walk independently with relatively
smooth movements and could climb the stairs. Honda's ASIMO robot rings
the opening bell at the New York Stock Exchange.
Honda's
Asimo was the first robot that could walk independently with relatively
smooth movements and could climb the stairs. Honda's ASIMO robot rings
the opening bell at the New York Stock Exchange.
![]() SONY
releases the AIBO ERS-7 it's 3rd generation robotic pet.
SONY
releases the AIBO ERS-7 it's 3rd generation robotic pet.
![]() Epson
unveils the Monsieur II-P in April 2003.
Epson
unveils the Monsieur II-P in April 2003.
Miyazawa says, "The next challenge is to test the possibilities of microrobots in another dimension--the air. In many ways it is a natural progression from Monsieur II-P," which moves freely along the ground.

![]() Epson
releases the smallest robot.
Epson
releases the smallest robot.
Weighing 0.35 ounces (10 grams) and measuring 2.8 inches (70 millimeters) in height, the Micro Flying Robot is unveiled as the world's lightest and smallest robot helicopter. The company hopes it will be used as a "flying camera" during natural disasters. This prototype hardly flies more than a few meters though but the object is intended as a show case to what the company is capable of.
![]() Researchers
at Cornell University claim to have built the first self-replicating robot.
Researchers
at Cornell University claim to have built the first self-replicating robot.
The array of computerized cubes illustrates the principles of self-replication, says Hod Lipson, a professor of mechanical and aerospace engineering at Cornell who led the team that designed the repli-bots. Each "robot" is a small tower of computerized cubes linked by magnets. The magnets allow the cubes to link up with or detach themselves from one another. One stack of cubes puts its "head" on the table, then it picks up a new cube and sets it on this "seed." It repeats the process to build its sibling. Moreover, the new robot begins to assist the old in the building process.(27)
pictures: courtesy Cornell university 2005
You can see this replicator in action at: http://www.mae.cornell.edu/ccsl/research/selfrep/video/4x4ht4a.wmv
Fish seem very promising subjects to test robotic navigation.
Since October 6 in London Aquarium’s at County Hall three attractive looking robotic fish are swimming in a specially-designed tank.
They have been produced by Professor Huosheng Hu and his human-centred robotics team of the Department of Computer Science at the University of Essex. Professor Hu's team have been working with the London Aquarium for three years to develop a biologically inspired robotic fish which mimic the undulating movement of nature's fish species – aiming for the speed of the tuna; the acceleration of a pike, and the navigating skill of the eel.
The robotic fish have sensor-based controls and autonomous navigation capabilities – they can find their own way around the tank safely, avoiding the objects, and react to their environment. According to Professor Hu, the aim of the project is to bring the public in direct contact with robots, increasing their understanding of science and technology: 'This work has many real-world applications including seabed exploration, detecting leaks in oil pipelines, mine countermeasures, and improving the performance of underwater vehicles.'
The Aquarium's marine experts have worked with the robotics team to share their knowledge of the behavior and movement of a wide variety of fish, and have provided the facilities within the Aquarium for the robotics team to study many species in great detail.(1)
![]()
| Last Updated on 12-Nov-2006 | For suggestions please mail the editors |
Footnotes & References